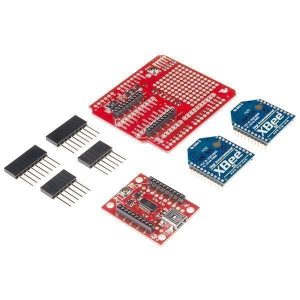

4WD Mecanum Wheel Robot Kit are 4 wheel drive mobile platforms based on Mecanum wheels. Each kit contains two left 60mm mecanum wheels as well as two right 60mm mecanum wheels. The four Mecanum wheels are each connected to a separate motor with independent control. Depending on each individual wheel direction and speed, the mobile platform can move forward, backward, sideways and any other desired directions or spin.
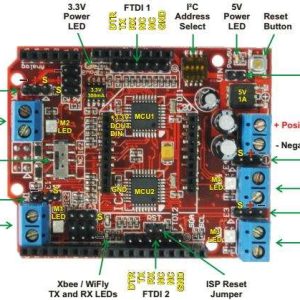
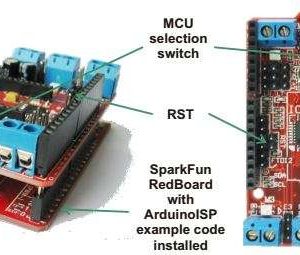
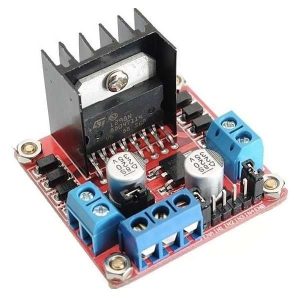
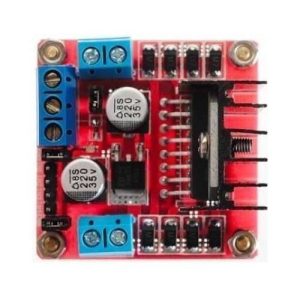
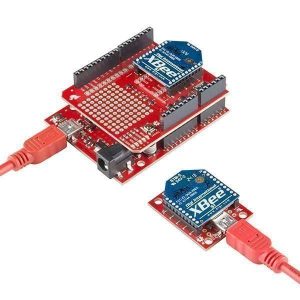
To steer the wheels, you’ll need something to toggle the motor driver like an Arduino, micro:bit, RP2040, Teensy or Raspbery Pi etc..
Note: Assembly is required. Battery, motor driver, and microcontroller are not included!
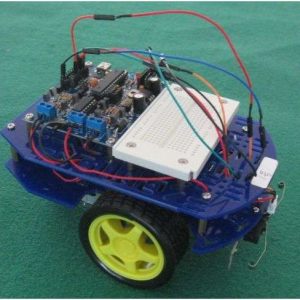
This is just the body of the robot with motor and wheel. It’s one of infinite possible designs, but gives you a sense of the possibilities for remote-control robotics.
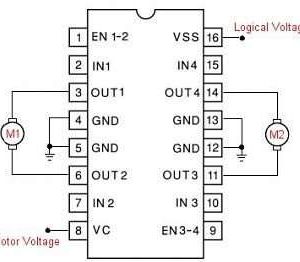
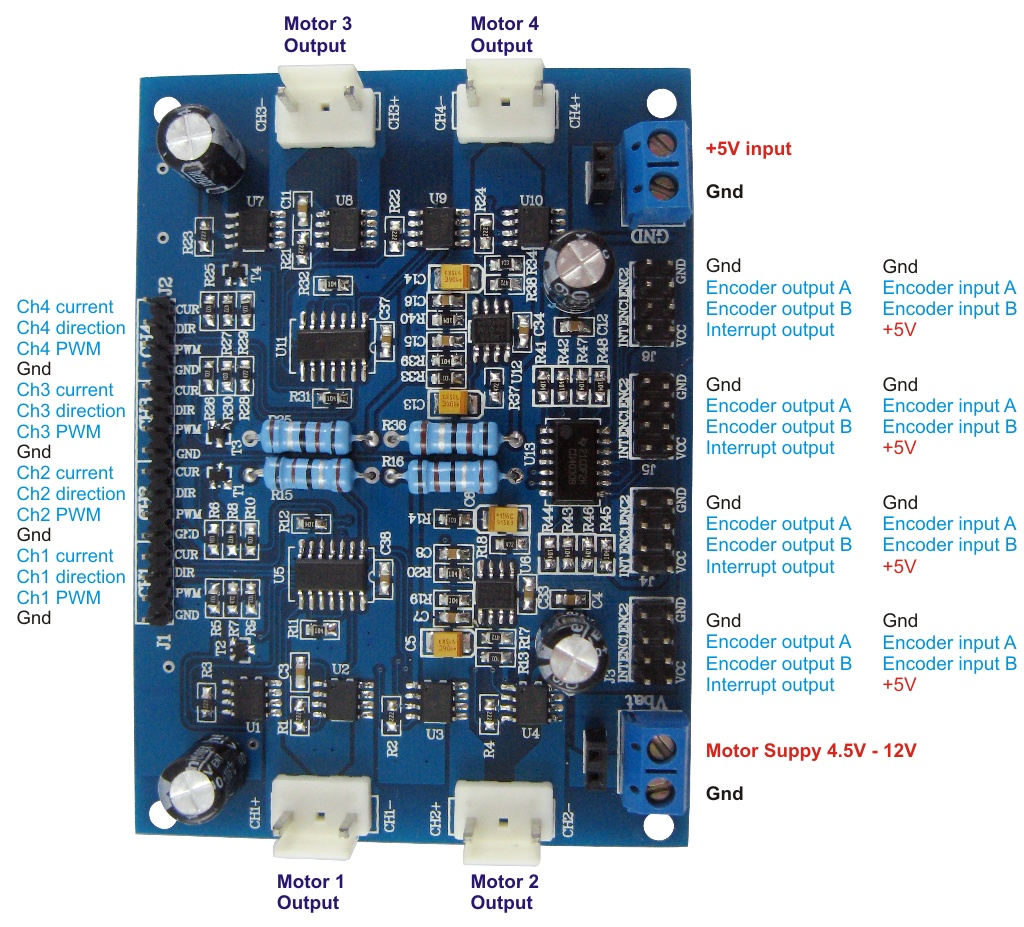
Specification of Motor Driver
Description
Wheel diameter: 60mm
Size: 255 x 150mm
Component List
Mecanum wheel x 4
TT Motor x 4
Aluminum alloy plate x 1
Matching screws
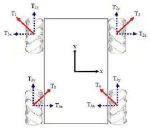
The Mecanum wheel is one design for a wheel which can move a vehicle in any direction. It is a conventional wheel with a series of rollers attached to its circumference. These rollers each have an axis of rotation at 45° to the plane of the wheel and at 45° to a line through the centre of the roller parallel to the axis of rotation of the wheel. There are two types of Mecunum wheels, left-handed and right-handed Mecunum wheel; the difference between them is the orientation of rollers. For left-handed Mecunum wheel, as shown below, rollers are orientated from lower right to upper left. Rollers for right-handed wheels are installed in the opposite way.
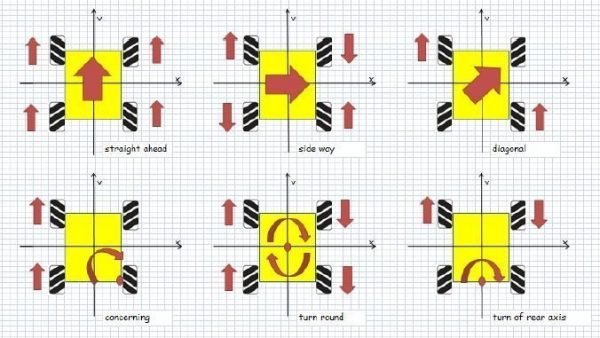
The installation of the 4WD Mecanum Wheel kit should demand some carefulness. A correct configuration requires each of four wheels is set in the way as shown below, where the rotation axis of each wheel’s top roller points to the center of the platform.