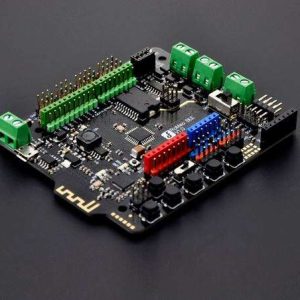
The Spider robot controllers were designed for robots requiring a large numbers of servos such as humanoid and hexapod style robots. Using an ATmega1280 CPU this controller is fully compatible with the Arduino Mega (1280). This controller includes a 3A switch mode power supply and is capable of driving up to 48 micro servos directly from the PCB. All of the processors 70 I/O pins are terminated as both a female header and a servo compatible 3pin male header.
Features
- ATmega2560 16MHz CPU
- 128K FLASH, 8K SRAM and 4K EEPROM
- USB interface and ISP socket
- Built in 3A switch mode power supply (7V – 30V input)
- 70 I/O pins with male and female headers
- Support for up to 48 servos
- 16 x 10bit analog inputs
- 15 x 8bit PWM outputs
- 1 x I2C
- 6 x External interrupt pins
- 4 x Serial communication
- Comes with Arduino boot-loader installed
Programming the Spider controller
The Spider controller has been designed to be 100% compatible with the Arduino Mega and comes with the Arduino boot loader installed. The boot loader allows programs written in the Arduino IDE to be uploaded via the USB interface.
– Driving up to 48 servos with a Spider controller
User manual
– Spider Controller Instruction Manual
Servo control – Code
#include <Servo.h>
// define global variables
int sp=1500;
int dr=5;
// define servos
Servo s00;
Servo s01;
Servo s02;
Servo s03;
Servo s04;
Servo s05;
Servo s06;
Servo s07;
Servo s08;
Servo s09;
Servo s10;
Servo s11;
Servo s12;
Servo s13;
Servo s14;
Servo s15;
Servo s16;
Servo s17;
Servo s18;
Servo s19;
Servo s20;
Servo s21;
Servo s22;
Servo s23;
Servo s24;
Servo s25;
Servo s26;
Servo s27;
Servo s28;
Servo s29;
Servo s30;
Servo s31;
Servo s32;
Servo s33;
Servo s34;
Servo s35;
Servo s36;
Servo s37;
Servo s38;
Servo s39;
Servo s40;
Servo s41;
Servo s42;
Servo s43;
Servo s44;
Servo s45;
Servo s46;
Servo s47;
void setup()
{
s00.attach(2);
s01.attach(3);
s02.attach(4);
s03.attach(5);
s04.attach(6);
s05.attach(7);
s06.attach(8);
s07.attach(9);
s08.attach(10);
s09.attach(11);
s10.attach(12);
s11.attach(13);
s12.attach(14);
s13.attach(15);
s14.attach(16);
s15.attach(17);
s16.attach(18);
s17.attach(19);
s18.attach(20);
s19.attach(21);
s20.attach(22);
s21.attach(23);
s22.attach(24);
s23.attach(25);
s24.attach(26);
s25.attach(27);
s26.attach(28);
s27.attach(29);
s28.attach(30);
s29.attach(31);
s30.attach(32);
s31.attach(33);
s32.attach(34);
s33.attach(35);
s34.attach(36);
s35.attach(37);
s36.attach(38);
s37.attach(39);
s38.attach(40);
s39.attach(41);
s40.attach(42);
s41.attach(43);
s42.attach(44);
s43.attach(45);
s44.attach(46);
s45.attach(47);
s46.attach(48);
s47.attach(49);
}
void loop()
{
s00.writeMicroseconds(sp);
s01.writeMicroseconds(sp);
s02.writeMicroseconds(sp);
s03.writeMicroseconds(sp);
s04.writeMicroseconds(sp);
s05.writeMicroseconds(sp);
s06.writeMicroseconds(sp);
s07.writeMicroseconds(sp);
s08.writeMicroseconds(sp);
s09.writeMicroseconds(sp);
s10.writeMicroseconds(sp);
s11.writeMicroseconds(sp);
s12.writeMicroseconds(sp);
s13.writeMicroseconds(sp);
s14.writeMicroseconds(sp);
s15.writeMicroseconds(sp);
s16.writeMicroseconds(sp);
s17.writeMicroseconds(sp);
s18.writeMicroseconds(sp);
s19.writeMicroseconds(sp);
s20.writeMicroseconds(sp);
s21.writeMicroseconds(sp);
s22.writeMicroseconds(sp);
s23.writeMicroseconds(sp);
s24.writeMicroseconds(sp);
s25.writeMicroseconds(sp);
s26.writeMicroseconds(sp);
s27.writeMicroseconds(sp);
s28.writeMicroseconds(sp);
s29.writeMicroseconds(sp);
s30.writeMicroseconds(sp);
s31.writeMicroseconds(sp);
s32.writeMicroseconds(sp);
s33.writeMicroseconds(sp);
s34.writeMicroseconds(sp);
s35.writeMicroseconds(sp);
s36.writeMicroseconds(sp);
s37.writeMicroseconds(sp);
s38.writeMicroseconds(sp);
s39.writeMicroseconds(sp);
s40.writeMicroseconds(sp);
s41.writeMicroseconds(sp);
s42.writeMicroseconds(sp);
s43.writeMicroseconds(sp);
s44.writeMicroseconds(sp);
s45.writeMicroseconds(sp);
s46.writeMicroseconds(sp);
s47.writeMicroseconds(sp);
sp+=dr;
if (sp>2000 || sp<1000) dr=-dr;
delay(1);
}
Demo
You have the option to add a shield.
The High Power Shield is designed to extend your Red Back Servo controller enabling the use of a dedicated Battery or Power Supply to power the servos. The standard Red Back Controller, by default, is capable of powering up to 48 servos at 5V with a combined current draw of 3Amps. If your servos or application require Higher Voltages or Currents, the High Power Shield is the ideal solution. It breaks out all the Logic pins of the Red Back Spider Controller and offers a separate power input for the Servos.