




The SCS15 high torque (17 kg.cm max) robot servo has the ability to track its speed, temperature, shaft position, voltage, and load. The servo can be configure as positional or continuous rotation mode. The control algorithm used to maintain shaft position on the SCS15 robot servo can be adjusted individually for each servo, allowing you to control the speed and strength of the motor’s response. All of the sensor management and position control is handled by the servo’s built-in microcontroller. This distributed approach leaves your main controller free to perform other functions.
The SCS15 robot servo is a Serially Controlled servo that provides commands and feedback parameters to allow complete control over your robot application. The Serial protocol is daisy chained, meaning several servos can be connected to each other in a chain and offer several compliance and sensing parameters that can be configured and read including position, velocity and temperature.
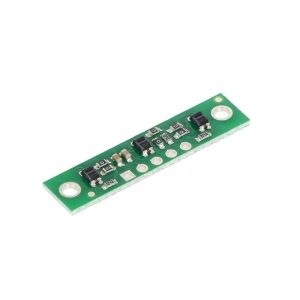
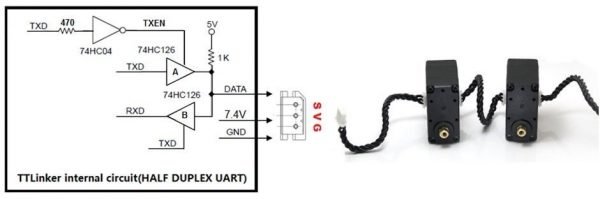
The SCS15 smart control servo use special half-duplex UART bus as input source. User need to use a SCPC-2 programmer to configure the smart control servos using PC via USB port, or make a TTL linker circuit to communicate to other host MCU.
You can use Arduino to control SCServo. You will need a TTLinker connected between Arduino and SCServo.
TTLinker is a signal conversion board. Arduino needs to convert its UART signals to the half duplex type and through TTLinker connect to SCServo.
Specifications
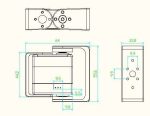
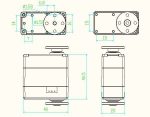
- Dimensions : 40.0 x 20.0 x 40.5 mm
- Weight : 56g
- Operating Angle : 200 Deg. servo mode (or continuous rotation when set to wheel mode)
- Bus Interface : TTL Level Multi Drop
- Control Type : Bus Packet Communication
- Control Protocol : Half Duplex Asynchronous Serial Communication
- Servo ID available : 0 – 253
- Communication Speed : 38400 bps – 1M bps
- Feedback Type : Position, Temperature, Load, Speed, Voltage
- Operating Voltage : 6.0V – 8.4V
- Stall Torque (Kg.cm) : 15 (6V) – 17 (8.4V)
- Stall Current : 1.5A (7.4V)
- Speed (RPM) : 55 (6V) – 73 (8.4V)
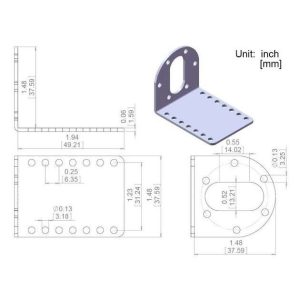
Each servo comes with the horn, bracket kit and control cable


You can use Arduino to operate the servo via TTLinker

Or Arduino Nano
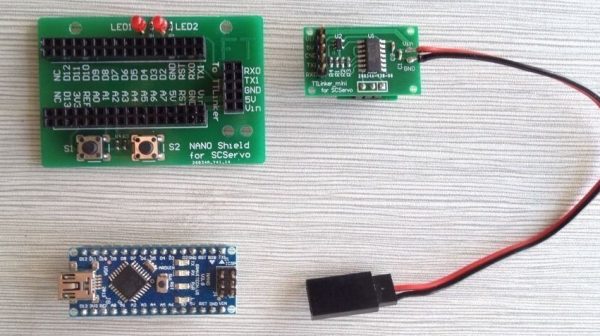
To control the SCServo actuators, the main controller needs to convert its UART signals to
the half duplex type. The recommended circuit diagram for this is shown below.
Arduino Library HERE
Sample Application – 6 DOF Biped
Sample Application – 10 DOF Biped