You can even connect these to Arduino. Read below..
Features
- High Torque
- Plastic gears
- Dual ball bearing
- TTL-multi drop (Daisy Chain) communication
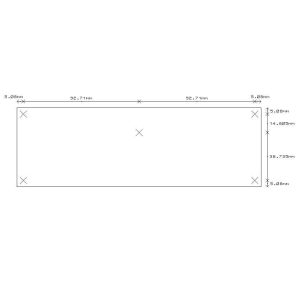
- Rear Pivot mount for superior support
- Dual mouting lugs allowing servo to be mounted positively
Includes
- 1pc of AX-12 Dynamixel
- 1pc Plastic Bracket
- 1pc of Wire
- 1pc of Plastic Horn
- Instruction manual
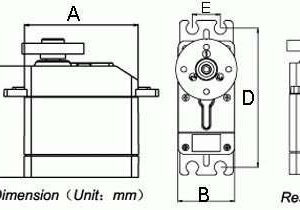
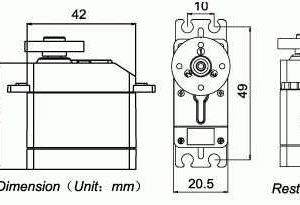
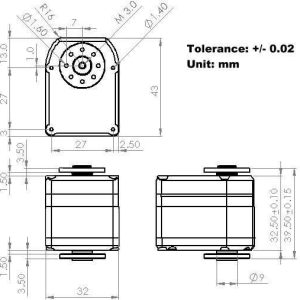
Specifications (General Tolerance of 1mm and 5g applies)
- Torque : 12 kg.cm @ 7V (16.5 kg.cm @ 9.6V)
- Speed : 0.269 seconds / 60 Degrees @ 7V (0.196 seconds / 60 Degrees @ 9.6V)
- Length : 50mm
- Breadth : 26mm
- Height : 38mm
- Weight : 55 grams
- Operating Angle : 360 Deg
- Operating Voltage : 7-10V
The Dynamixel AX-12 robot servo has the ability to track its speed, temperature, shaft position, voltage, and load. These parameters are coded on 10 bits each. Also, the algorithm used to maintain shaft position on the ax-12 actuator can be adjusted individually for each servo, allowing you to control the speed and strength of the motor’s response. All of the sensor management and position control is handled by the servo’s built-in microcontroller (ATMega 8). The Dynamixel AX-12 servos are different from regular hobby servos. They connect to a serial bus, and each has an ID number. Rather than receiving a PWM signal, one must write to onboard memory locations through the serial protocol.
To control the Dynamixel AX-12 with an Arduino, use library below.
1. The Arbotix Robotis Library.
This library offers hi-level commands like:
- SetPosition(servo_id, position) – set the position of a servo.
- TorqueOn(servo_id) – turns on the torque
- Relax(servo_id) – turns off the torque, allows hand-posing the servos
It is possible to import file created by PyPose. One of the most important features of dynamixel AX-12 servos is that you can move the servo to a particular position by hand and read the position back from the servo. This feature allows us to pose the robot, and capture the pose. PyPose just do that. You might create a series of poses, and then assemble them into a motion sequence, export the file and use it from within your sketch. This libray also support interpolation speed, which is an important consideration. If the servo moves to fast, a walking robot will likely topple over. AX-12 servos are too fast to let them go directly to the new position, so if one want a gradual change, one will need to interpolate between the current pose and the next pose. The BioloidController library allows this to be done very easily.
2. Pablo Gindel Arbotic library evolution.
Based on the former library, Pablo Gindel adapted it to the arduino. The Arbotis controller having two UART, You will also have to use SoftSerial to communicate with your PC, or other master controller. Other than that, modifications were quite easy.